Tanner Schmidt
I am a computer vision researcher interested in real-time vision, unsupervised visual representation learning, geometry-based computer vision, and vision for robotics. Currently I'm working as a Research Scientist at Meta Reality Labs.

First-Author Publications:

Segment This Thing: Foveated Tokenization for Efficient Point-Prompted Segmentation
Tanner Schmidt, Richard NewcombeCVPR 2025
Project | Paper | Code | Video
A modification of the Segment Anything Model (SAM), increasing efficiency through foveated tokenization.
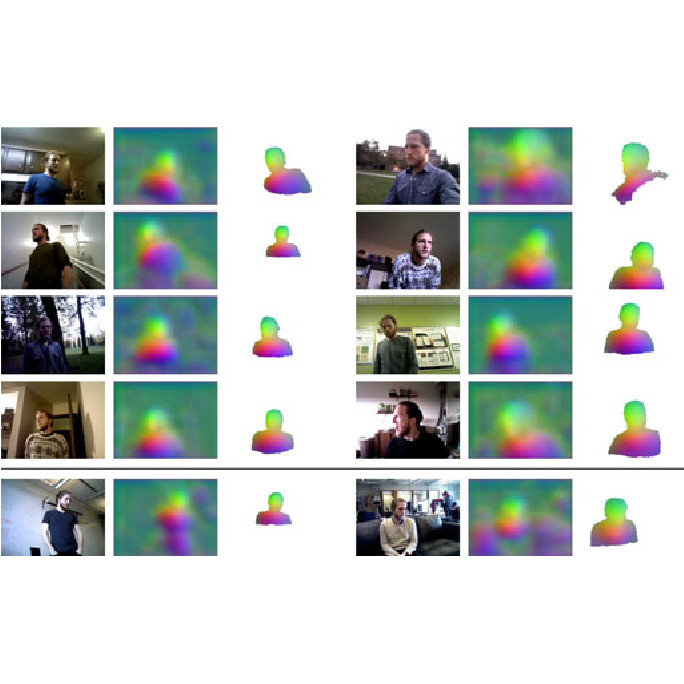
Self-Supervised Visual Descriptor Learning for Dense Correspondence
Tanner Schmidt, Richard Newcombe, Dieter FoxIEEE Robotics and Automation Letters 2 (2016)
Dense visual descriptors are training using a contrastive loss and similarity labels provided by a 3D reconstruction system.
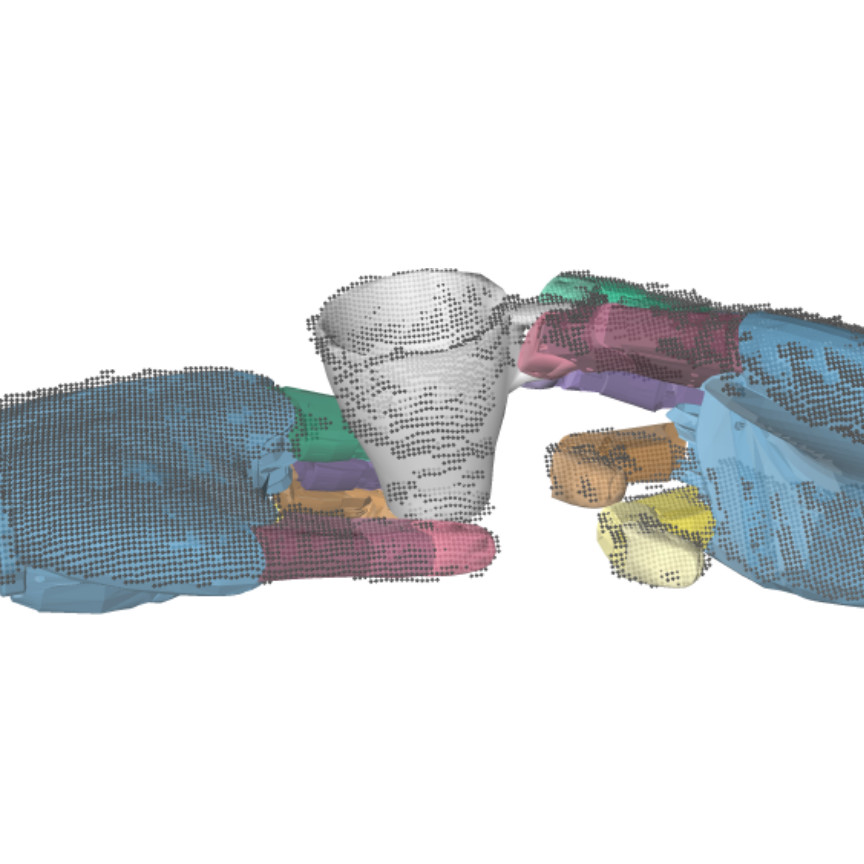
Depth-based Tracking with Physical Constraints for Robot Manipulation
Tanner Schmidt, Katharina Hertkorn, Richard Newcombe, Zoltan Marton, Michael Suppa, Dieter FoxICRA 2015
A depth-based tracker provides real-time estimates of the pose of robot hands and target objects for tele-operated grasping.
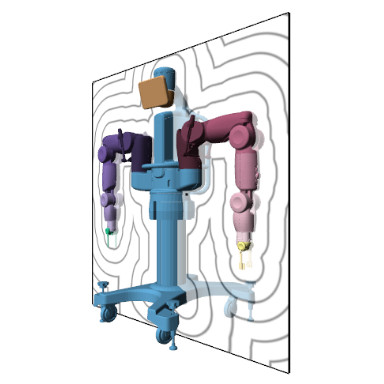
DART: Dense Articulated Real-Time Tracking
Tanner Schmidt, Richard Newcombe, Dieter FoxRSS 2014
A CUDA-accelerated model-based tracker using a signed distance function representation of target objects.
Datasets:

YCB-Video
A dataset of RGB-D videos of static configurations of YCB objects. Annotations of object poses are provided.
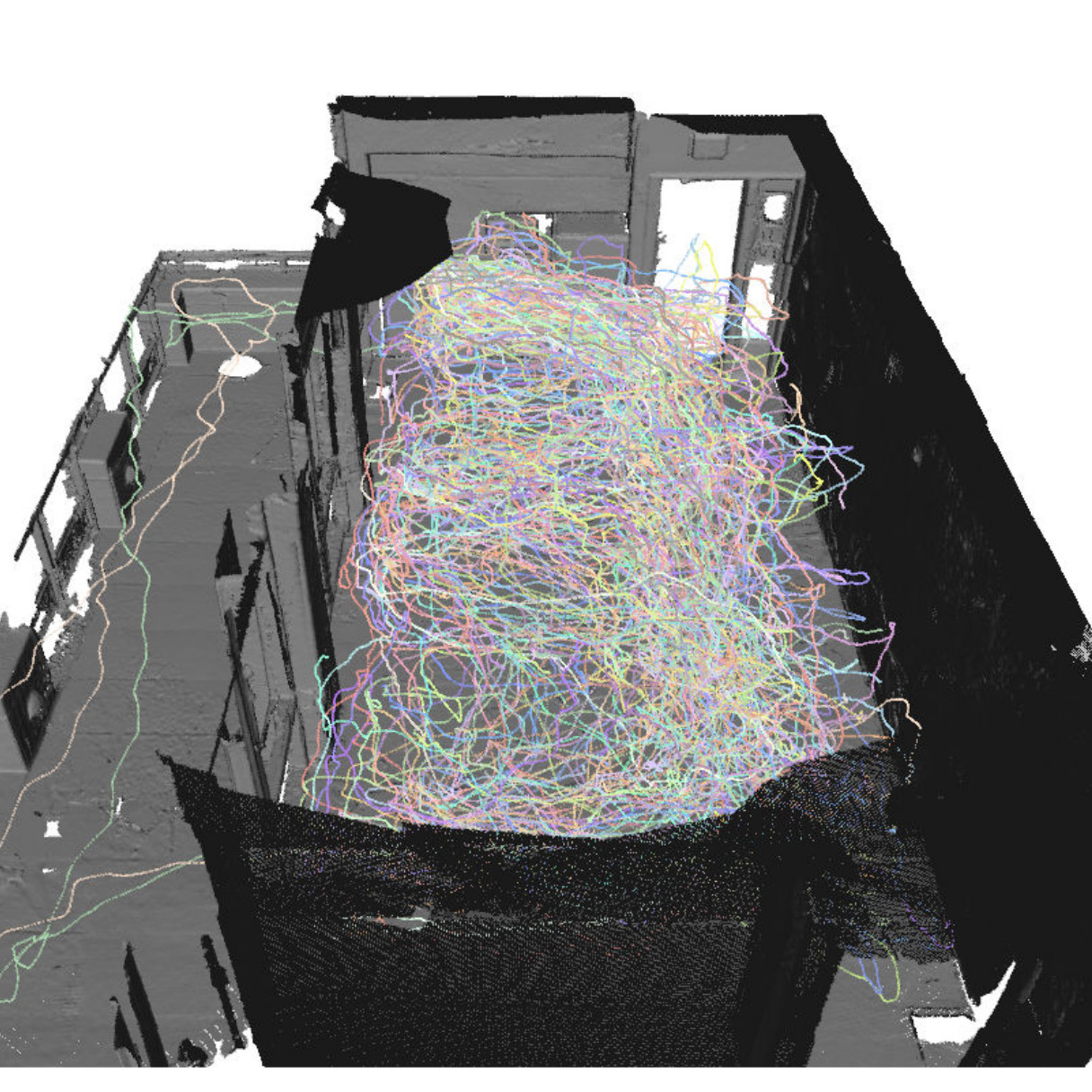
Jaech Gallery Dataset
A dataset of RGB-D videos capturing the same scene in a variety of lighting conditions and furniture configurations.